
在 Embedding 里 dim 的意思
dim 表示你操作的 维度索引。
张量有很多维度(axis),dim 决定了你在哪个维度上做操作。
举例:
1 | emb.shape = (32, 3, 2) |
这里 3 个维度的含义分别是:
dim=0 → batch 维度(32 个样本)
dim=1 → 序列长度(每个样本 3 个索引)
dim=2 → embedding 向量维度(每个索引是 2 维)
Embedding 查表 (Embedding Lookup)
思路拆解
X 的形状
X.shape = (32, 3)含义:一共有 32 个样本(batch),每个样本里面有 3 个索引。
C 的形状
C.shape = (27, 2)含义:这是一个查找表(embedding table),一共有 27 行,每行是 2 维向量。
C[X] 的运算
对每个
X[i, j],用它作为索引,去C里取对应的那一行(形状(2,))。所以一行 X
[a, b, c]会变成C[[a, b, c]],形状(3, 2)。整个 32 个样本就堆叠起来,得到
(32, 3, 2)。
公式
在你的例子里:
(32,3)+(2,)=(32,3,2)(32, 3) + (2,) = (32, 3, 2)
拼接方式
1. 展平(flatten)
最高效的拼接方法
1 | emb.view(32, 6) |
因为 (32, 3, 2) 可以理解为 3×2=6,所以把最后两维拼起来,得到
1 | emb.view(32, 6).shape = (32, 6) |
每个样本的 embedding 被拉平成一个长度为 6 的向量。
2.手动切片再拼接
1 | torch.cat([emb[:, 0, :], emb[:, 1, :], emb[:, 2, :]], dim=1) |
emb[:, 0, :]→ (32, 2)emb[:, 1, :]→ (32, 2)emb[:, 2, :]→ (32, 2)
拼接后(32, 6)。
3.利用 unbind
1 | torch.cat(torch.unbind(emb, dim=1), dim=1) |
torch.unbind(emb, dim=1)会把第 1 维(长度=3)拆开 → 得到 3 个(32, 2)张量再
torch.cat(..., dim=1)拼接 →(32, 6)
两种方法都是 把 (32,3,2) 转成 (32,6),本质上等价于 emb.view(32,6)。
项目拆解:
模型的输入和输出维度是变化的,我们来一步步拆解一下。
简单来说,可以把数据在网络中的流动想象成一个工厂流水线,原材料(输入)在每个工位(网络层)都会被加工,其“形状”(维度)也会随之改变。
我们用视频中的具体例子来解释:
batch_size(批量大小) = 32block_size(上下文长度) = 3embedding_dim(嵌入向量维度) = 10vocab_size(词汇表大小) = 27hidden_size(隐藏层神经元数量) = 200
输入 (Input) 的维度变化
输入的处理过程主要有三步,每一步的维度都不同:
最原始的输入
X:(32, 3)维度:
(batch_size, block_size)解释: 这是我们喂给模型的第一批原始数据。它是一个整数张量(Tensor)。每一行是一个训练样本(共32个),每一行中的3个数字是构成上下文的3个字符的索引(例如,
[5, 13, 13]代表 ‘e’, ‘m’, ‘m’)。此时,数据还没有“特征”的概念,只是代表字符的编号。
经过嵌入层后的输入
emb:(32, 3, 10)维度:
(batch_size, block_size, embedding_dim)解释: 这是真正进入神经网络计算的特征。模型通过一个查找表
C(形状为(27, 10)),将上一步的每个字符索引(如5)都转换成了一个10维的特征向量(词嵌入)。所以,原来(32, 3)的索引矩阵,就变成了(32, 3, 10)的浮点数特征矩阵。现在每一行代表一个样本,每个样本包含3个10维的向量。
展平(Flatten)后的输入:(32, 30)
维度:
(batch_size, block_size * embedding_dim)解释: 全连接的隐藏层(Linear Layer)无法直接处理
(32, 3, 10)这样的三维输入。它需要一个二维的矩阵,形状为(批量大小, 特征数量)。因此,我们需要将每个样本的3个10维向量拼接成一个单一的30维向量。这一步就是通过torch.view操作完成的。view(32, 30)将(32, 3, 10)的数据“压平”成了(32, 30)。这才是隐藏层接收到的最终输入。
输出 (Output) 的维度
网络的最终输出,我们只关心其预测结果的维度。
最终输出
logits:(32, 27)维度:
(batch_size, vocab_size)解释: 经过隐藏层(输出
(32, 200))和最后的输出层之后,模型为我们批量中的每一个样本(共32个),都生成了一个包含27个数值的向量。这27个数值就是 logits(原始得分),分别对应着字母表中下一个字符可能是’a’到’z’以及特殊字符’.’的概率得分。这个得分越高,代表模型认为该字符是下一个正确字符的可能性越大。
这个
(32, 27)的输出会和我们的目标标签Y(一个形状为(32,)的整数向量,包含了32个样本的正确答案索引)一起被送入F.cross_entropy损失函数中,用于计算损失并进行反向传播。
完整流程:
1. 输入:确实是一整个“批次”的“索引矩阵”
我们不是一个一个字符地输入,也不是一个一个样本(一组上下文)地输入,而是一次性输入一个**批次(batch)**的数据。
输入
X的形状是(32, 3):这代表我们一次性处理 32个不同的训练样本。每个样本的维度是
3:这3个数字就是您说的“拼接好的字符索引”,也就是上下文窗口(block_size)中的3个字符在词汇表里的编号。
2. Embedding层:学习“关系”的压缩空间
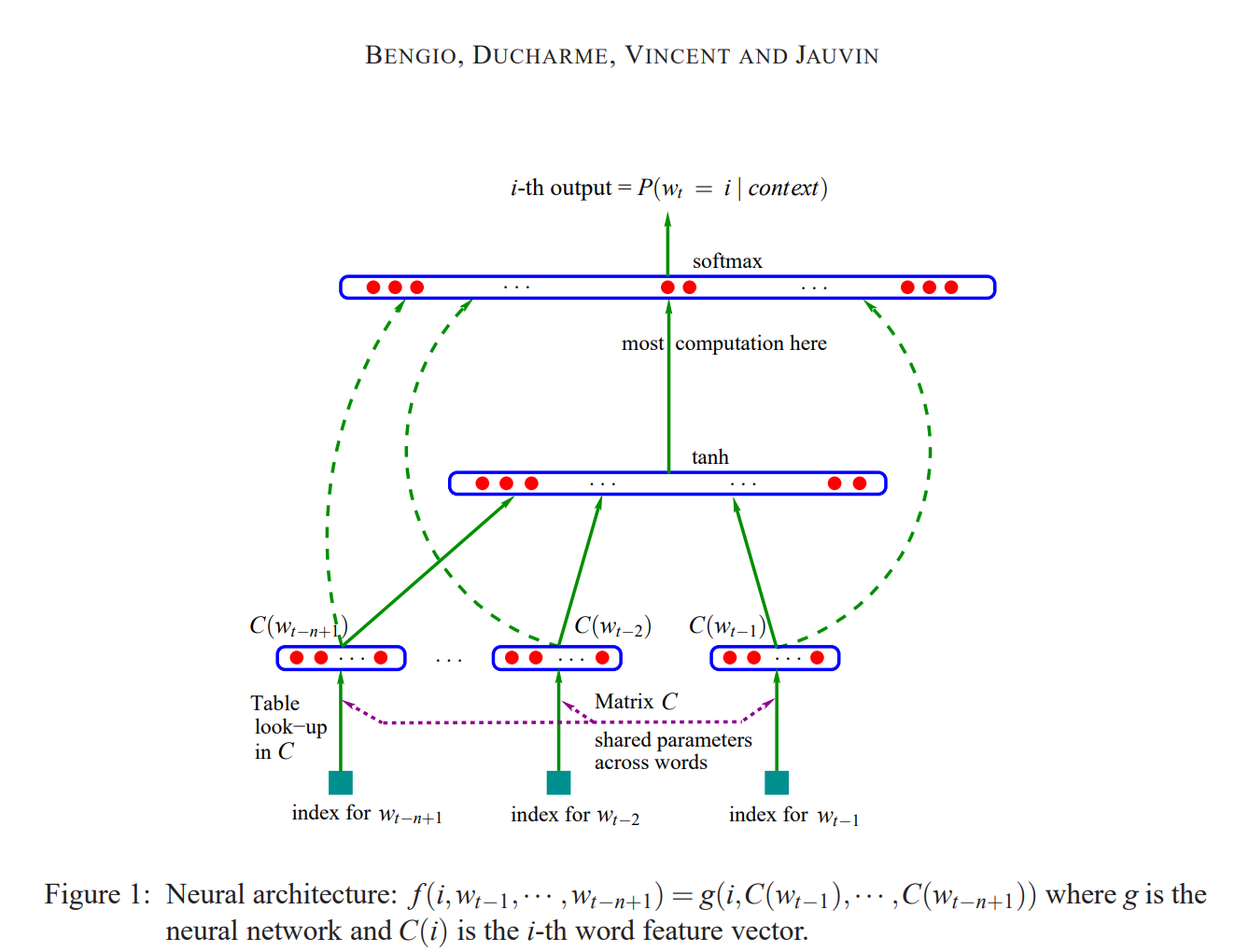
查找与转换:模型接收到
(32, 3)的索引后,会去一个叫做C的大矩阵(图中的 “Matrix C”)里查找。这个C的形状是(27, 10),相当于一张有27行、10列的表格。学习相似性:输入的每个索引(比如
5)就对应表格中的某一行(第5行),这一行就是一个10维的向量。在训练过程中,模型会不断调整这个C矩阵里的值,使得功能或意义上相似的字符(比如所有的元音字母)它们的向量在10维空间里的位置会变得越来越接近。
3. 展平(Flatten):为隐藏层准备“标准格式”的输入
经过 Embedding 后,我们的数据形状从
(32, 3)变成了(32, 3, 10)。但是,标准的全连接隐藏层(图中标着
tanh的那一层)只能接收一个二维矩阵(样本数, 特征数)。因此,我们必须把每个样本的
(3, 10)这部分“铺平”,也就是将3个10维的向量拼接成1个30维的长向量。这样数据形状就从(32, 3, 10)变成了(32, 30),完美地符合了隐藏层的输入要求。
4. 输出层:一个需要 уточнение (clarification) 的小细节
隐藏层激活 (tanh):数据
(32, 30)进入隐藏层,经过线性变换后,使用tanh函数进行激活。tanh是作用在隐藏层的。输出层 (Logits):
tanh的输出结果,再进入下一个线性层(图中最上面的蓝色粗框),计算出最终的得分(logits)。这个输出的形状是(32, 27)。概率转换 (softmax):最后一步,才是将这个
(32, 27)的得分矩阵通过softmax函数,转换成概率分布。softmax是作用在最终输出层之后,用来解释结果的。
流程是: 展平 -> 隐藏层线性变换 -> tanh 激活 -> 输出层线性变换 -> softmax。
Pytorch的强大之处-Fused Kernel:
Fused Kernel(融合计算核心) 是现代深度学习框架(如PyTorch, TensorFlow)和硬件(GPU)中一个至关重要的性能优化技术。
厨房的比喻
非融合操作 (Non-Fused Operation):
想象一下你在厨房做一道菜,需要三个步骤:1.切菜,2.炒菜,3.装盘。
你先把所有菜都切好,然后把它们全部放回冰箱(慢速内存)。接着,你再从冰箱里把切好的菜拿出来,开始炒菜,炒好后又全部放回冰箱。最后,你再从冰箱里把炒好的菜拿出来,开始装盘。
在这个过程中,你来回开关冰箱、存取食材花费了大量的时间。
融合操作 (Fused Operation / Fused Kernel):
现在,你把需要处理的菜放在手边的操作台(快速缓存/寄存器)上。你直接在操作台上完成切菜、炒菜,然后立刻装盘。整个过程一气呵成,几乎没有浪费时间去冰箱存取半成品。
Fused Kernel 的技术解释
在GPU计算中,“冰箱”就是速度较慢的全局内存(Global Memory),“操作台”就是速度极快的片上缓存或寄存器(On-chip Cache/Registers)。
Kernel (计算核心):
一个 “Kernel” 是指发送给GPU执行的一个独立的计算任务。例如,torch.exp(x) 会启动一个指数运算的Kernel,torch.sum(y) 会启动一个求和的Kernel。
Fused Kernel (融合计算核心):
它指的是将多个独立的、连续的计算步骤(Kernels)合并成一个单一的、更大的Kernel。
F.cross_entropy 这个函数就是使用了 Fused Kernel。我们来看看它融合了哪些操作:
如果不使用 Fused Kernel,手动计算交叉熵损失需要以下步骤:
logits -> Softmax
a. 对 logits 取指数 torch.exp() (启动第1个Kernel,生成一个中间结果)
b. 对指数结果按行求和 torch.sum() (启动第2个Kernel,又一个中间结果)
c. 用指数结果除以和 a / b (启动第3个Kernel,得到概率 probs)
probs -> Negative Log Likelihood Loss
d. 对概率 probs 取对数 torch.log() (启动第4个Kernel,又一个中间结果)
e. 根据正确标签 y 提取对应的对数概率 (启动第5个Kernel)
f. 取负数并求平均值 (启动第6个Kernel)
你看,这个过程不仅繁琐,而且每一步都会产生一个巨大的中间张量(比如 probs),这些张量需要被写入GPU的全局内存,然后在下一步再被读取出来。这种频繁的内存读写是非常耗时的。
使用 F.cross_entropy (Fused Kernel) 的情况:
你只需要调用一个函数,它会启动一个高度优化的 Kernel。这个Kernel在GPU内部,一口气完成上述所有的计算步骤。中间结果(如probs)尽可能地被保留在超高速的片上缓存中,而不需要写入慢速的全局内存。
Fused Kernel 的三大优势
大幅减少内存读写 (Drastically Reduces Memory I/O):这是最核心的优势。避免了生成和存储多个巨大的中间张量,从而显著减少了对慢速全局内存的访问次数,极大提升了计算速度。
减少计算启动开销 (Reduces Kernel Launch Overhead):CPU每次命令GPU启动一个Kernel都有微小的开销。启动1个大Kernel比启动6个小Kernel的总体开销要小得多。
提升数值稳定性 (Improves Numerical Stability):这也是视频中提到的关键点。在计算
exp(logits)时,如果logits中的数值很大,结果可能会溢出变成inf(无穷大),导致计算错误。融合后的Kernel可以使用一些数学技巧(如 Log-Sum-Exp Trick)来巧妙地避免这种溢出问题,使得计算在数值上更加稳定和精确。
交叉熵损失(Cross-Entropy Loss)
第一部分:Softmax (从 Logits 到概率)
“把logit进行exp之后,归一化”,这个操作本身就叫 Softmax 函数。
目的:它的唯一目的就是将模型输出的一组任意分值的
logits(例如[-1.2, 3.4, 0.5]),转换成一个规范的概率分布。特性:经过 Softmax 处理后,输出的向量有两个特点:
所有元素都在 0 到 1 之间。
所有元素之和等于 1。
结果:这样我们就得到了模型预测的:“下一个字符是’a’的概率是10%,是’b’的概率是85%,是’c’的概率是5%…”
第二部分:负对数似然损失 (Negative Log Likelihood Loss)
后续步骤 “将索引和标签输入概率矩阵,取log,取平均,取负号”,这部分合起来就是负对数似然损失。
挑选正确概率:我们从上面得到的概率分布中,只关心正确答案所对应的那个概率值。比如,如果正确答案是 ‘b’,我们就从
[0.10, 0.85, 0.05]中挑选出0.85。取 Log 再取负号 (
-log(p)):这是损失函数的核心。如果模型预测得非常准,正确答案的概率
p接近1(比如0.99),那么-log(0.99)是一个非常小的数(接近0)。这意味着损失很小,惩罚很轻。如果模型预测得非常差,正确答案的概率 p 接近 0(比如 0.01),那么 -log(0.01) 是一个非常大的数。这意味着损失很大,惩罚很重。
这个特性完美地符合我们对一个损失函数的要求:预测越差,惩罚越重。
取平均:因为我们一次处理一个批次(batch)的样本(比如32个),我们会为这32个样本分别计算出损失值。最后,我们将这32个损失值加起来求一个平均,得到一个单一的数值,代表模型在这个批次上的总体表现。这个最终的数值就是我们用来进行反向传播、更新模型参数的依据。
minibatch加速
一、为什么需要 Batch?(动机)
想象一下,你的整个训练数据集 X 有20多万个样本。训练模型需要计算损失函数对参数的梯度,以便更新参数。这里有两种极端的做法:
极端一:使用全部数据 (Full Batch)
做法:一次性将20多万个样本全部喂给模型,计算一个总损失,然后进行一次反向传播和参数更新。
缺点:计算量极其巨大。20多万个样本的前向传播和反向传播可能会耗尽你的内存,而且花费的时间会非常非常长。你可能要等几分钟甚至几小时才能完成一步更新。
极端二:一次只用一个数据 (Stochastic Gradient Descent, SGD)
做法:一次只随机取一个样本,计算损失,更新一次参数。
缺点:极其不稳定。单个样本带来的梯度具有很大的随机性,可能会让模型的训练过程像喝醉酒一样摇摇晃晃,虽然大方向对,但收敛速度会很慢。同时,这也没有充分利用GPU并行计算的优势。
Minibatch (小批量) 就是介于两者之间的完美平衡点。我们一次取一小撮数据(例如32个),这一小撮数据就称为一个 “minibatch”。
优点:
计算高效:32个样本的计算量很小,一步更新非常快。
梯度稳定:32个样本的平均梯度比单个样本的梯度要稳定得多,能更准确地指向正确的下降方向。
充分利用硬件:可以高效地进行并行计算。
二、代码是怎么实现 Batch 的?(图解)
现在我们来逐行看懂图中# minibatch construct部分的代码,这正是“抓取一小撮数据”的过程。
1 | # 假设 X 的总大小是 (228146, 3) |
X.shape[0]: 这是获取我们完整数据集X的总样本数,也就是总行数,比如228146。torch.randint(0, 228146, (32,)): 这是这行代码的核心。它的意思是:请在一个从
0到228145的整数范围内……随机地、可重复地抽取…
…
32个整数。执行后,
ix会变成一个包含32个随机数字的张量(Tensor),例如tensor([501, 189234, 98, ..., 76521])。
ix现在就是我们这一批(batch)随机选出来的样本的“门牌号”或者说“行索引”。emb = C[X[ix]]和loss = F.cross_entropy(logits, Y[ix])X[ix]: 这是利用ix来从整个数据集X中“取出”数据的关键一步。PyTorch/Numpy允许我们用一个索引列表(或张量)来一次性地选取多行数据。X[ix]的结果就是一个新的、更小的张量,形状为(32, 3)。这 32 行数据就是我们本次训练要用的 minibatch。Y[ix]: 同理,我们使用完全相同的索引ix从标签集Y中取出对应的32个正确答案。这保证了数据和标签是一一对应的。
“Learning Rate Range Test”(学习率范围测试)
一、 核心思想:为什么学习率如此重要?
首先,我们要理解学习率(Learning Rate, LR)扮演的角色。在梯度下降中,我们计算出让损失(loss)减小的“方向”(梯度),然后沿着这个方向“走一步”来更新模型的参数。
学习率就是你“这一步”迈得有多大(步长)。
学习率太小 (Too Low):你每一步都迈得小心翼翼,像在挪动。虽然方向是对的,但要走到谷底(损失最低点)会花费极长的时间,训练效率极低。
学习率太大 (Too High):你每一步都迈得大步流星。你可能一步就直接跨过了谷底,跳到了对面的山坡上。下一步你又想往回走,结果可能又跳了回来。最终结果就是在谷底两侧来回震荡,甚至越跳越远(损失爆炸,变成
NaN),永远无法收敛。
因此,找到一个“不大不小刚刚好”的学习率,是模型训练成功与否的关键。
二、 暴力搜索的问题
最朴素的想法是:“我多试几个值不就行了?比如 0.1, 0.01, 0.001…”。
这种方法的问题在于:
盲目:你不知道最佳值到底在哪个数量级,可能试了很多次都错过了最佳范围。
耗时:每次尝试都需要从头开始一次完整的训练,如果模型很大,试一次可能就要几个小时甚至几天,成本太高。
三、 高效技巧:学习率范围测试
演示的方法,就是为了解决上述问题。它在一个单次、短暂的实验中,系统性地探索从极小到极大的学习率范围,并观察其对损失的影响,从而快速定位出最佳的学习率区间。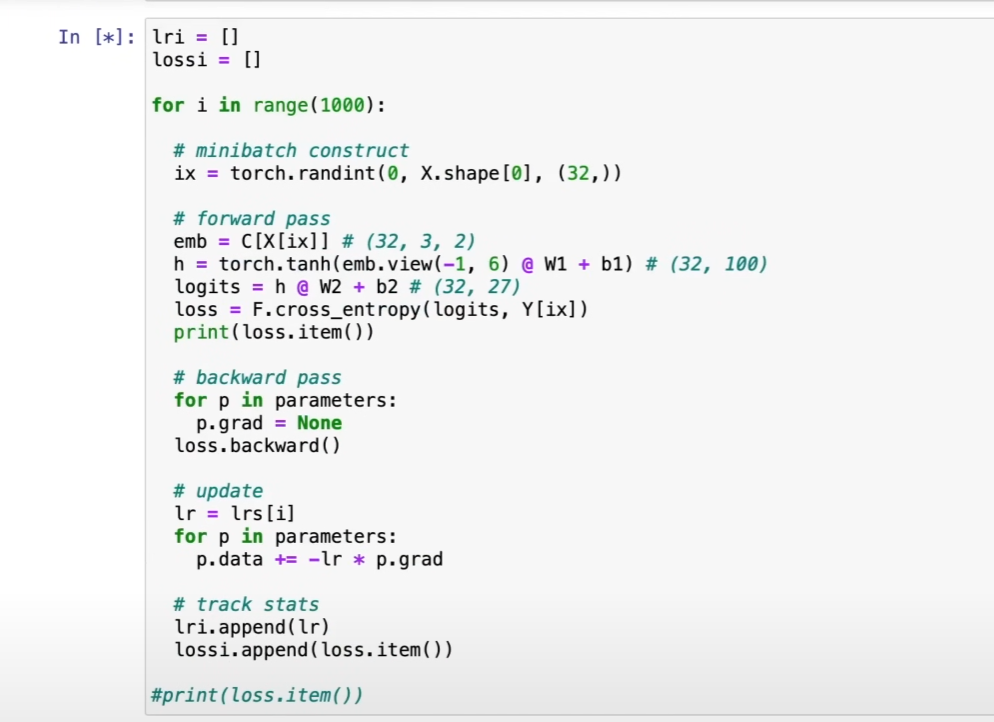
操作步骤 (Step-by-Step)
设定一个学习率的变化范围
我们不测试几个离散的点,而是测试一个连续变化的范围。关键在于,这个范围应该是对数尺度 (log scale) 的,因为我们更关心学习率的数量级(是 0.1 级别还是 0.01 级别)。
在代码中,这通常通过 lrs = 10**torch.linspace(-3, 0, 1000) 实现。
torch.linspace(-3, 0, 1000): 生成从 -3 到 0 的 1000 个等间距数字。10**...: 将上面的数字作为 10 的指数。结果就是
lrs包含了从10**-3(0.001) 到10**0(1.0) 的 1000 个平滑递增的学习率。
进行一个短暂的“预训练”
我们让模型开始训练,但不是用一个固定的学习率,而是在每一次迭代(或每一步)中,都从上面生成的 lrs 列表中按顺序取出一个新的、更大的学习率来更新参数。
第1步更新,使用
lr = 0.001第2步更新,使用
lr = 0.001007…
第1000步更新,使用 lr = 1.0
同时,在每一步,我们都记录下当前使用的学习率和该步计算出的损失值 (loss)。这个过程通常只需要几百或几千次迭代,非常快。
绘制并解读“学习率 vs. 损失”曲线
实验结束后,我们以学习率(X轴,对数坐标)和损失(Y轴)为坐标,将记录下的数据点绘制成图。你会得到一条非常典型的曲线,大致分为四个区域:
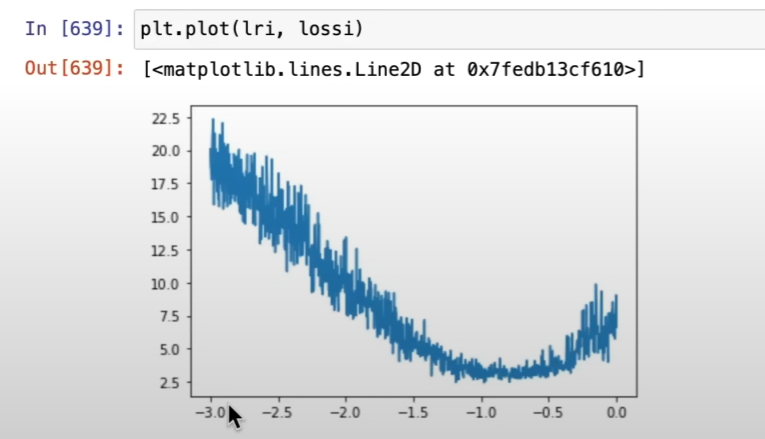
区域 A (平坦区):学习率太小。损失几乎不下降,因为步子太小,模型基本没在学习。
区域 B (急降区):学习率进入了合适的范围。损失开始迅速、稳定地下降。这是我们最感兴趣的区域。
区域 C (平原区):学习率达到了最佳值附近。损失下降到最低点,并可能维持一小段。
区域 D (爆炸区):学习率太大。损失突然开始急剧上升,模型训练开始发散,变得不稳定。
如何选择最佳学习率?
最关键的一步来了。看着这张图,你应该选择哪个值作为你正式训练的学习率呢?
错误的选择:直接选择让损失值最低的那个点(区域C的末端)。
为什么错误:这个点位于“悬崖边上”,是模型能够承受的最大学习率。虽然它在当前这个短暂的实验中让损失下降最快,但在漫长的正式训练中,任何微小的数据波动都可能让它“一步踏空”,直接进入爆炸区,导致训练失败。这个学习率太激进了。
正确且稳妥的选择 (Rule of Thumb):
找到损失开始爆炸前的最低点所在的学习率(比如图中的
10**-1,即0.1)。将这个值除以10。也就是
0.1 / 10 = 0.01(即10**-2)。这个
0.01就是一个非常棒的初始学习率!
这个选择让你处于急降区的中间位置(区域B)。在这个位置,学习率足够大,可以保证损失快速下降(训练速度快),同时又远离“悬崖”,有足够的安全边际来保证整个训练过程的稳定性。
解读loss函数图
整体训练状态
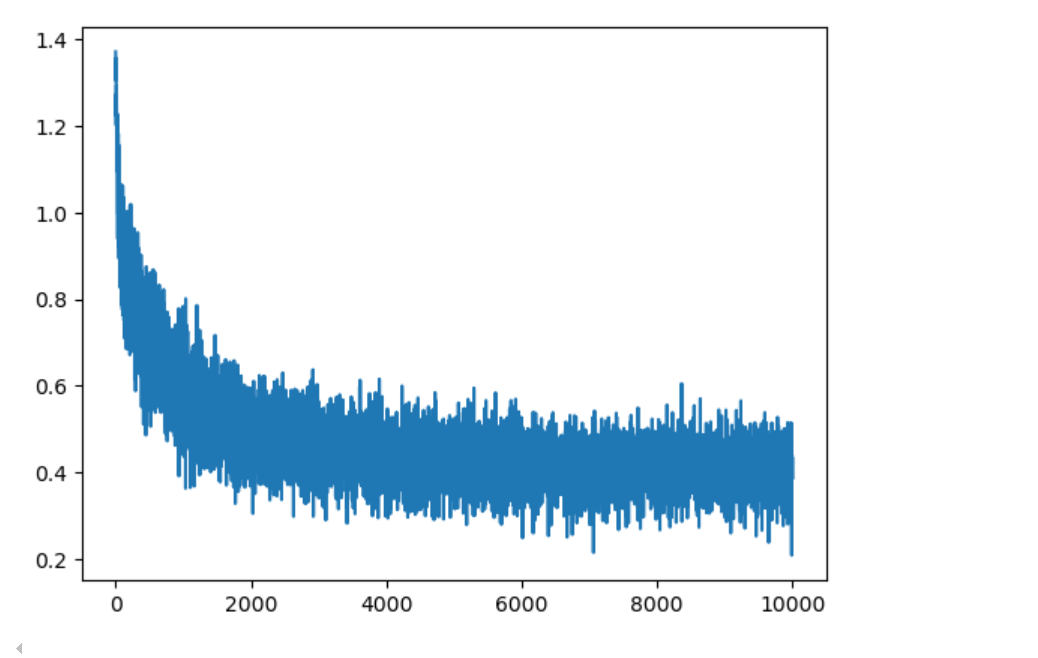
训练成功的迹象:
明显的下降趋势:损失从约 1.4 快速下降到 0.2 左右
收敛稳定:在后期基本稳定在较低水平
无明显震荡:曲线相对平滑,没有剧烈波动
详细阶段分析
阶段 1:快速下降期 (0-25000 步)
特征:损失急剧下降
含义:模型快速学习基本模式
学习率:0.1(较高),促进快速学习
阶段 2:平缓下降期 (25000-100000 步)
特征:下降速度放缓但持续
含义:模型细化对数据的理解
仍在学习:未完全收敛
阶段 3:稳定收敛期 (100000-200000 步)
特征:损失趋于稳定,小幅震荡
学习率切换:从 0.1 降到 0.01
收敛状态:模型基本训练完成
词嵌入空间
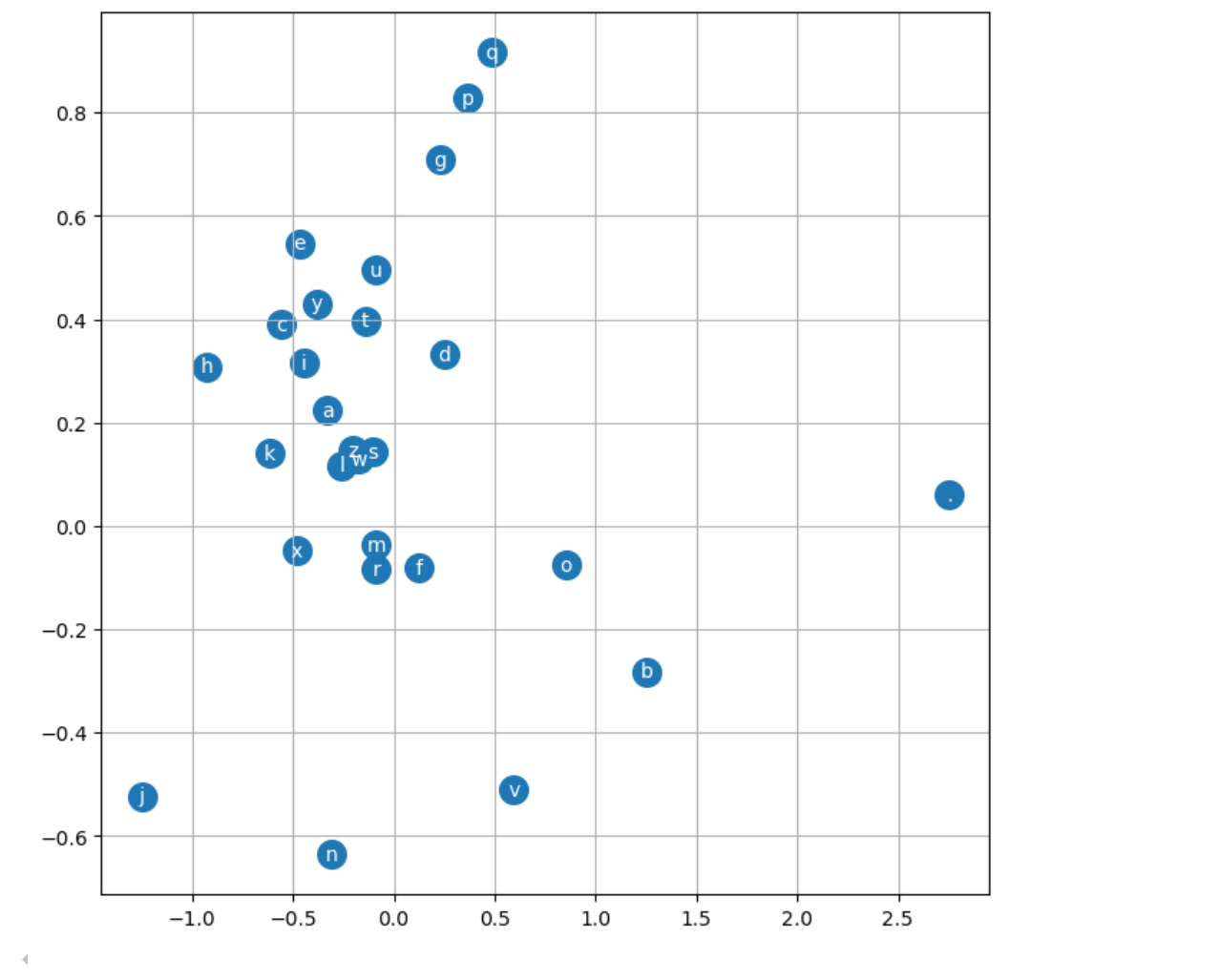
语言学模式发现
1. 元音字母聚类
观察:a, e, i, o, u, y 在图中相对聚集
位置:主要分布在中心区域 (-0.5 到 0.5 范围)
含义:模型自动学习到了元音的相似性
语言学意义:元音在名字中有相似的功能和分布模式
2. 特殊字符的独特位置
结束符 .:
位置:右上角 (约 2.5, 0.05),远离其他字符
含义:模型学习到结束符的特殊性
功能:标记单词边界,与其他字符有本质不同
3. 辅音字母的分散分布
观察:辅音字母分布更加分散
高频辅音:r, n, l, m 等相对靠近中心
低频辅音:j, q, x, z 等分布在边缘
含义:模型根据使用频率和上下文相似性进行了分组