goal
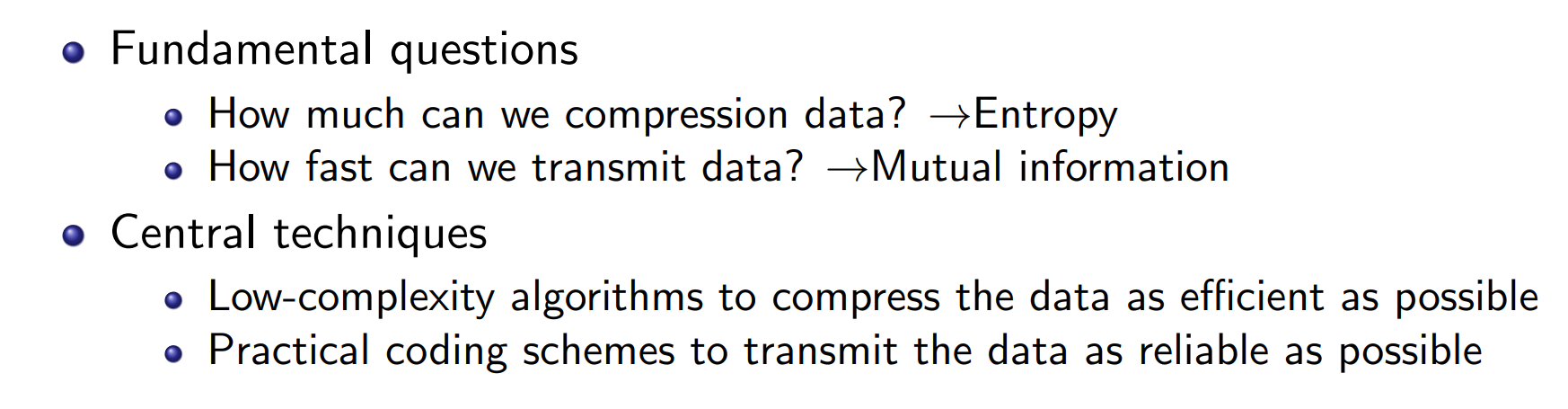
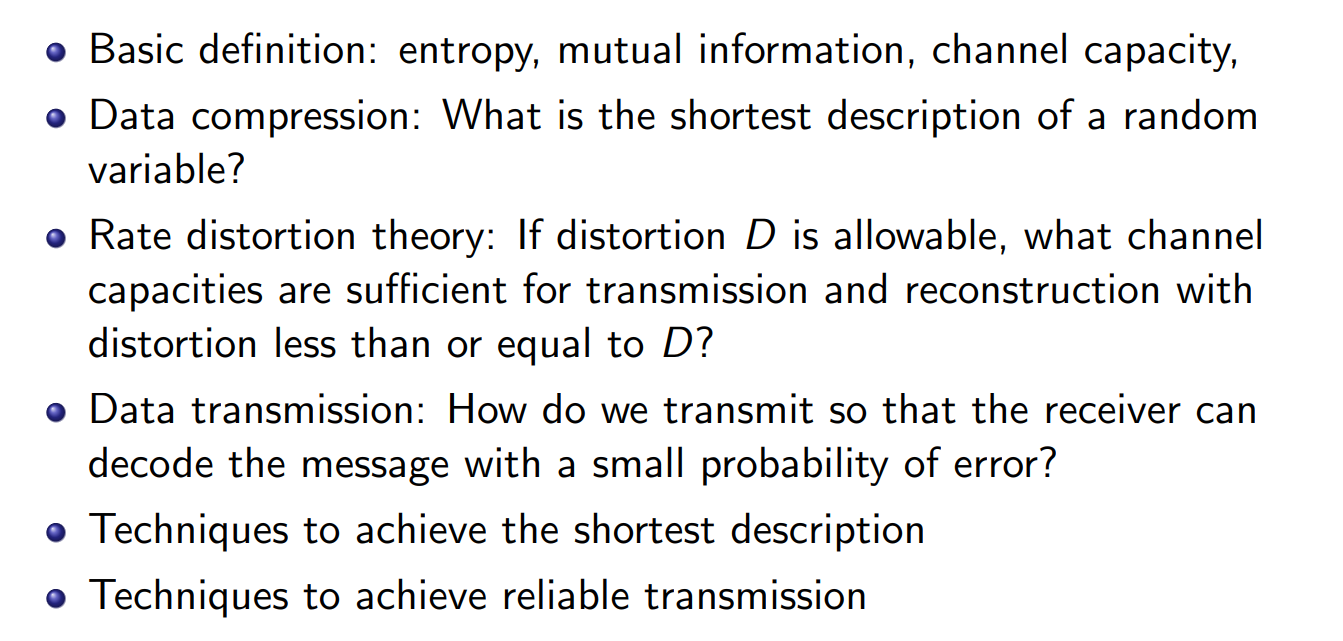
what should we learn
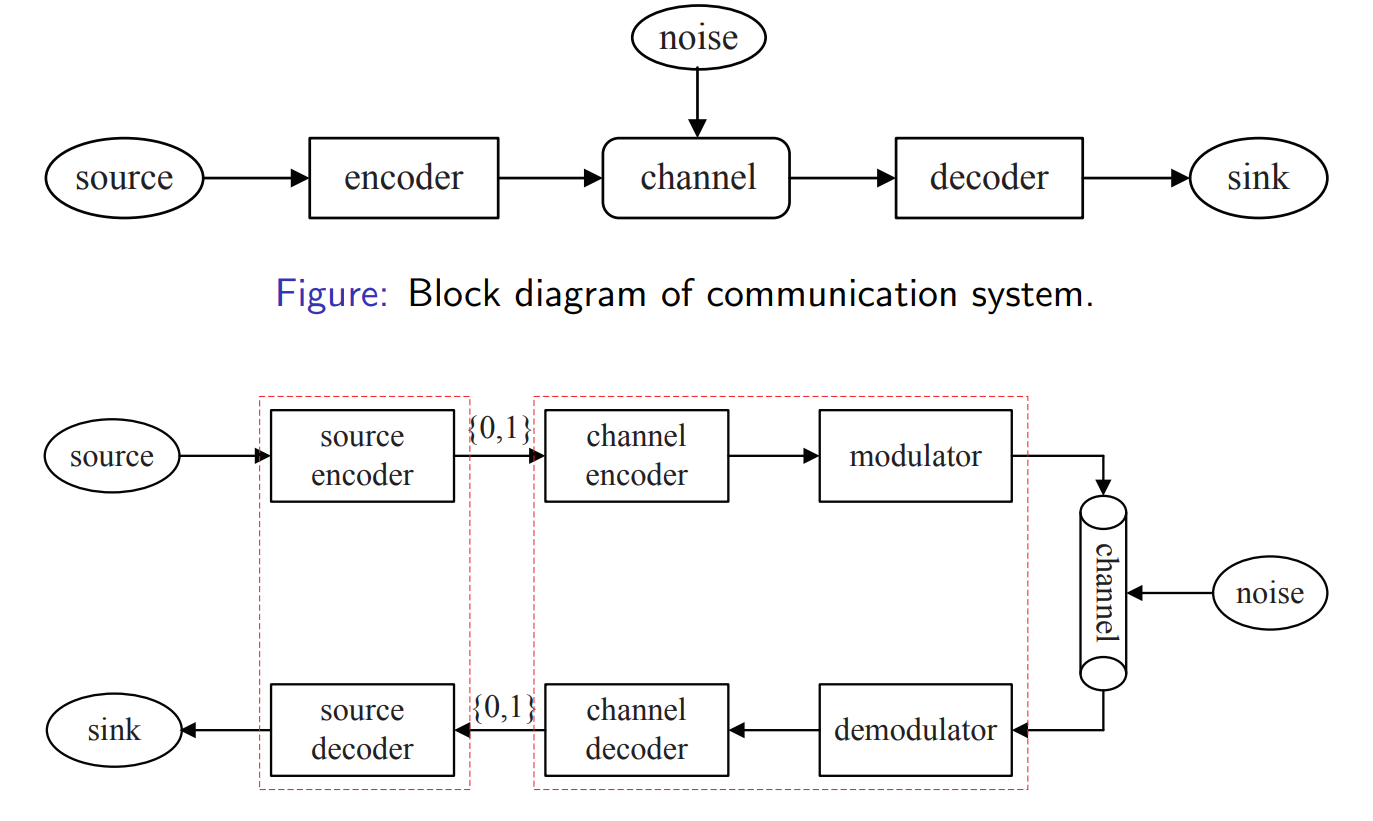
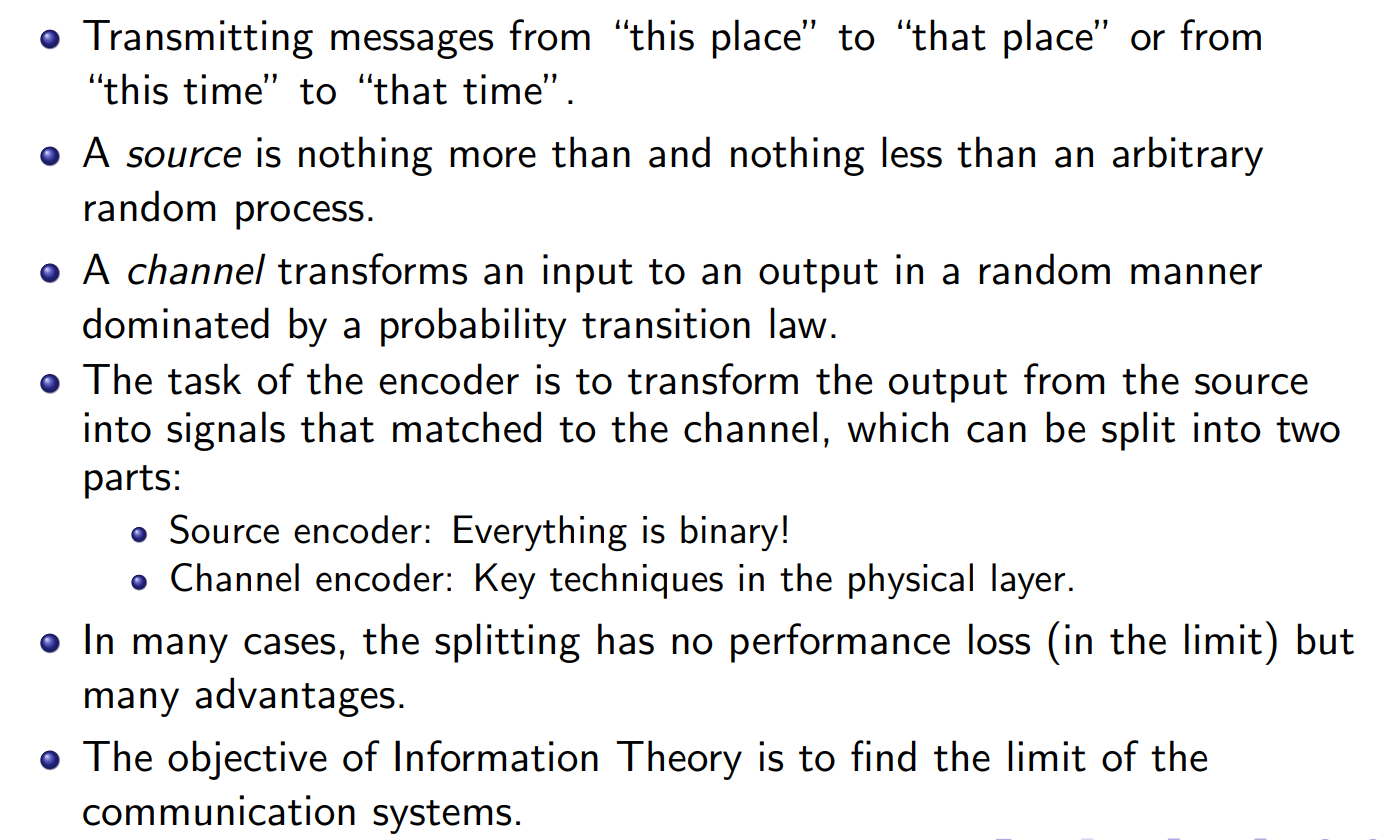
communication system
Source Encoder
- Converts the raw source (text, audio, image) into a sequence of bits
.
- Converts the raw source (text, audio, image) into a sequence of bits
Channel Encoder
- Adds redundancy to protect against noise.
Modulator
- Converts the encoded bits into waveforms/signals that can physically travel through the channel.
Channel + Noise
- The medium distorts the signal (attenuation, interference, random noise).
Demodulator
- Recovers the bit sequence from the noisy received signal.
Channel Decoder
- Uses redundancy added earlier to detect and correct errors.
Source Decoder
- Reconstructs the original message from the bit sequence (decompression, translation back to human-readable form).
Sink
- The final destination (e.g., your ear for audio, your screen for video, or your computer program).
Encoder
Works at the information/coding level (bit sequences).
Two main types:
Source encoder: compresses data into binary (e.g., JPEG, MP3, Huffman coding).
Channel encoder: adds redundancy for error protection (e.g., Hamming code, LDPC, Turbo codes).
Input/output:
- Takes raw data → outputs a stream of bits {0,1}{0,1}.
Purpose: make data efficient and reliable before physical transmission.
Modulator
Works at the signal/physical layer.
Converts the encoded bitstream into waveforms that can be transmitted over the physical medium (radio waves, optical fiber, etc.).
Examples:
BPSK (binary phase shift keying)
QAM (quadrature amplitude modulation)
OFDM (used in WiFi, 4G/5G)
Input/output:
- Takes binary bits → outputs analog/electromagnetic signals.
Purpose: adapt binary data to the physical channel so that it can actually travel.
information
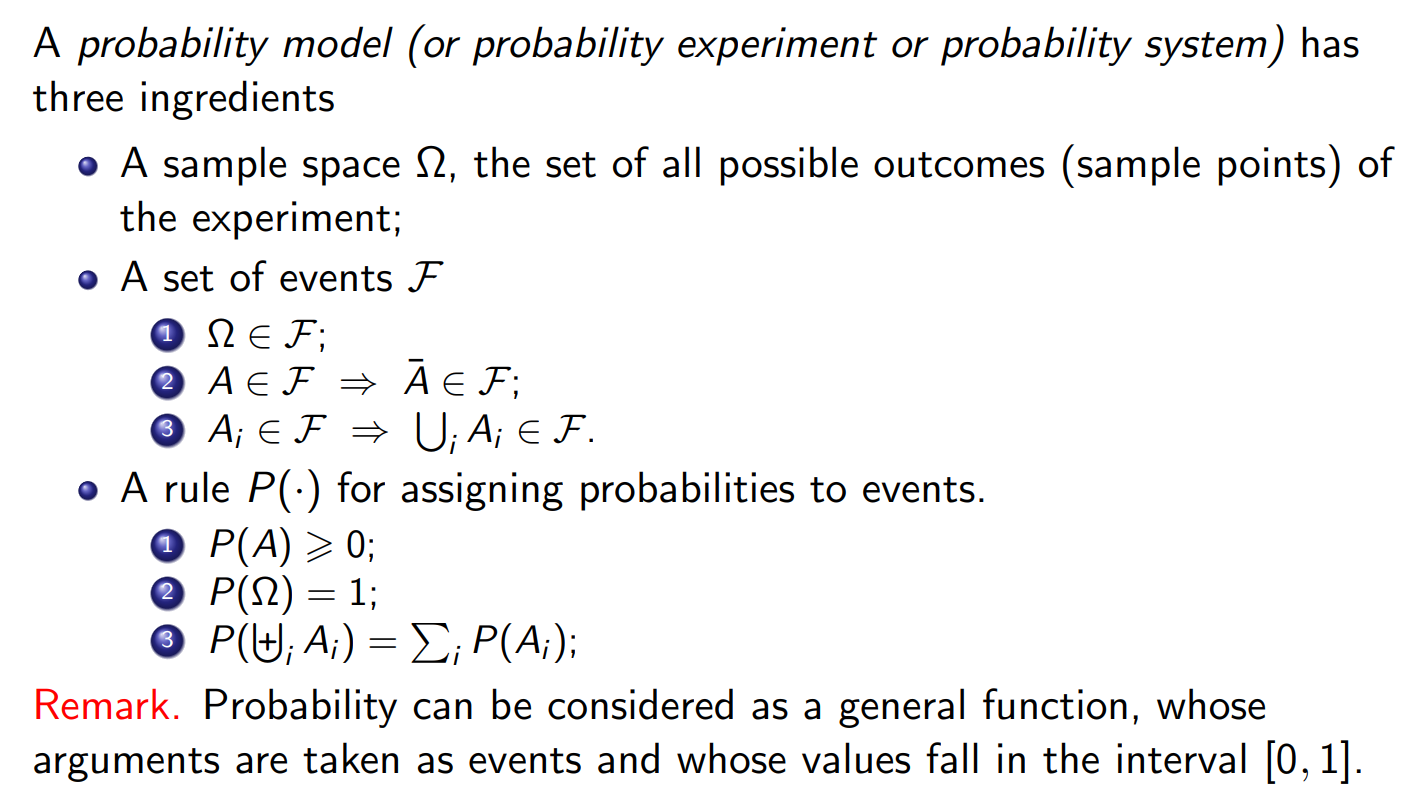
Probability Model
Probability law
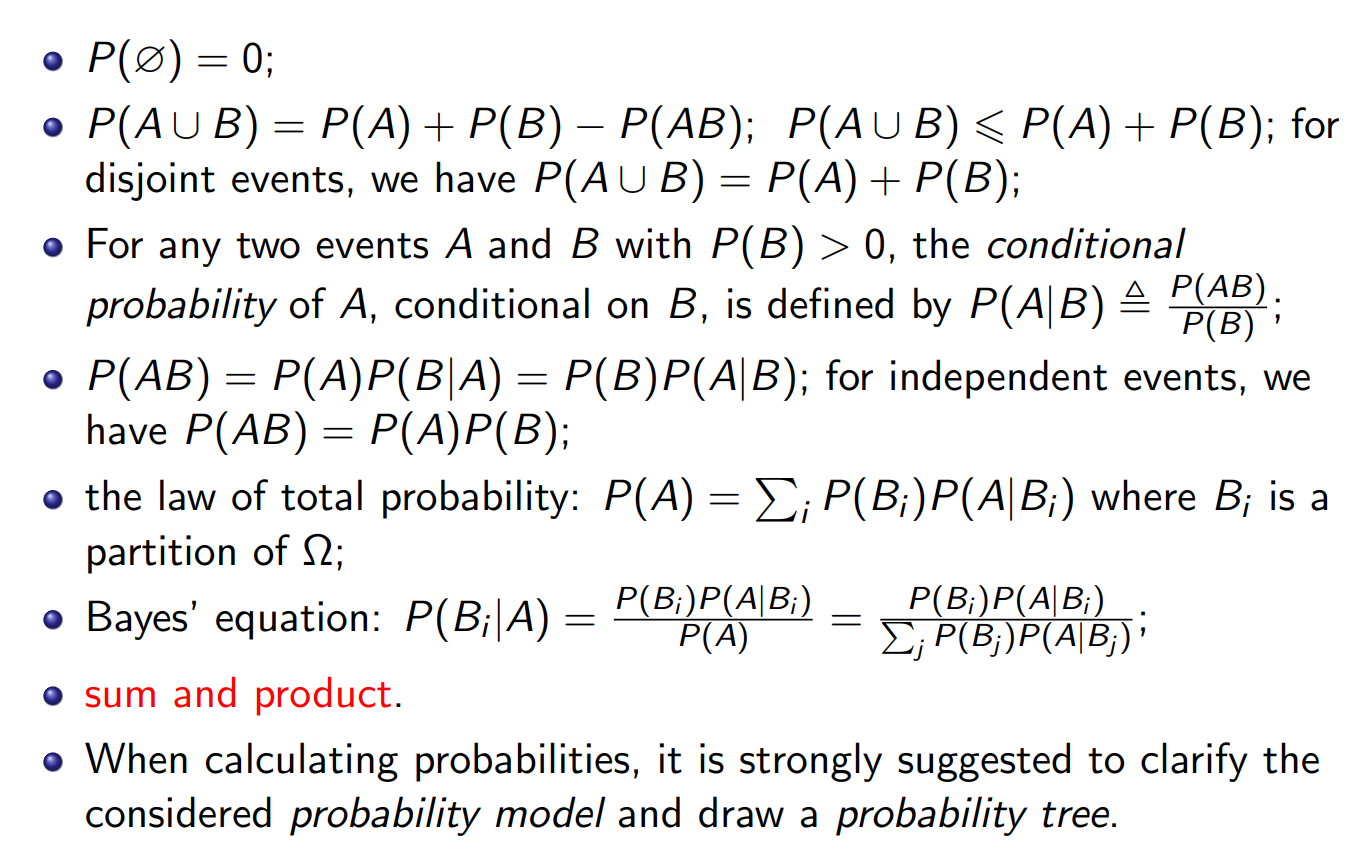
Bayes’ equation
The Formula
Bayes’ theorem relates conditional probabilities:
where:
P(A) = prior probability of event A.
P(B∣A) = likelihood of observing B given A.
P(B) = total probability of B (normalizing factor), computed as
if
Interpretation
Prior P(A): what you believed before seeing data.
Likelihood P(B∣A): how compatible the data is with your hypothesis.
Posterior P(A∣B): your updated belief after seeing the data.
Random Variable
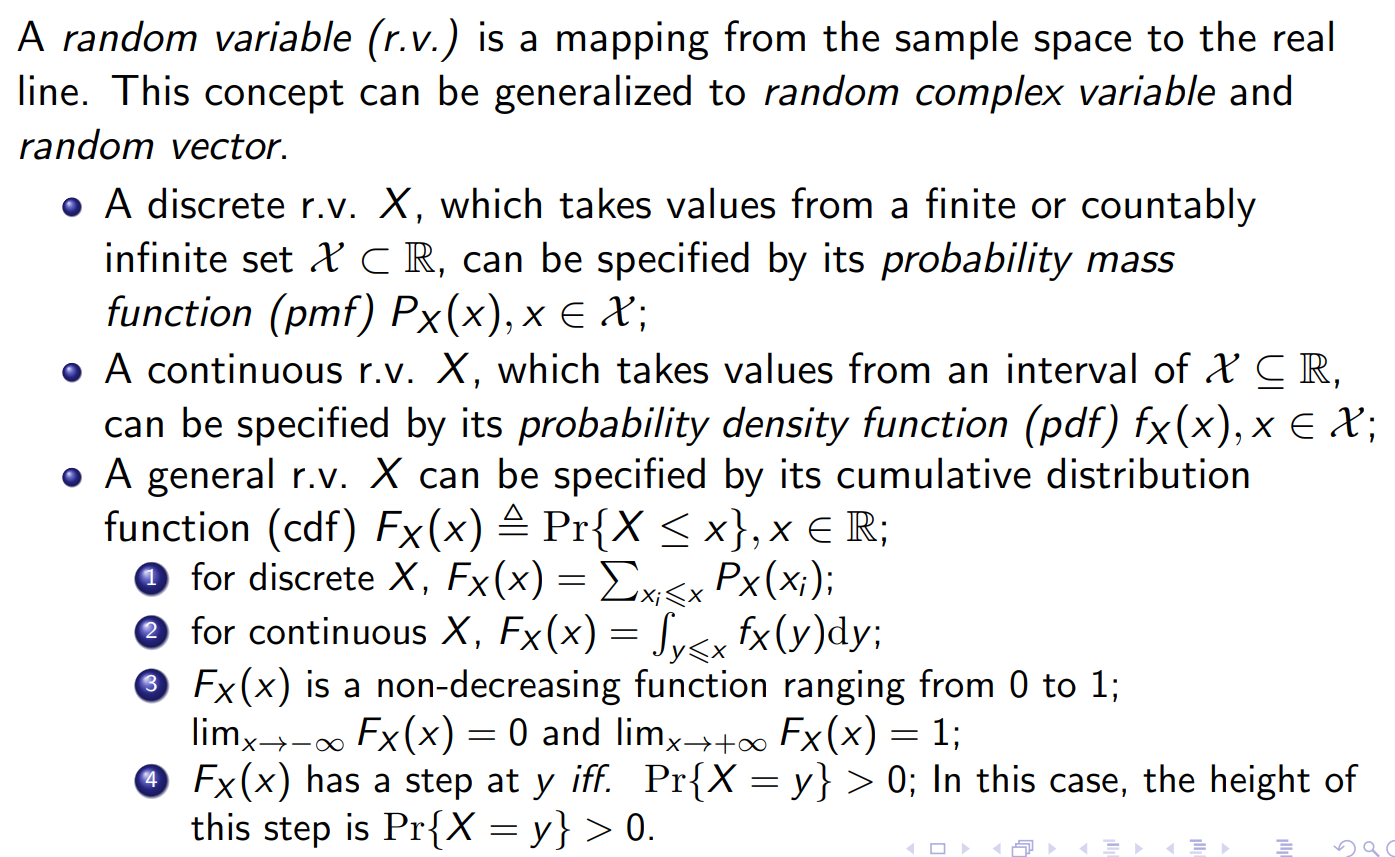
Relationship Between X and
The random variable X is the mapping from outcomes to numbers.
The PMF
is the distribution that tells us how likely each number is. X = “what values are possible?” (e.g. 1–6 for a die).
= “how are probabilities spread across those values?” (e.g. each has probability 1/6).
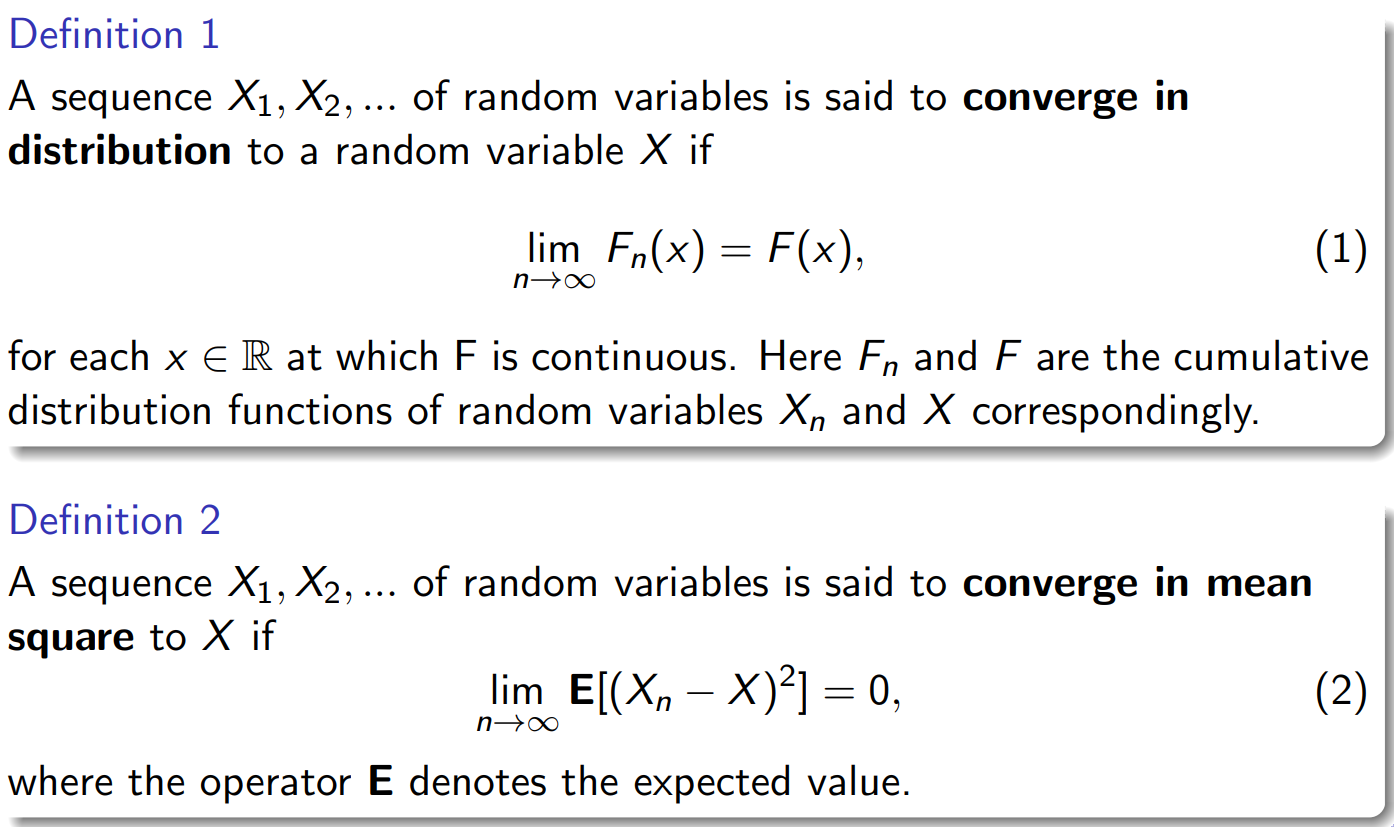
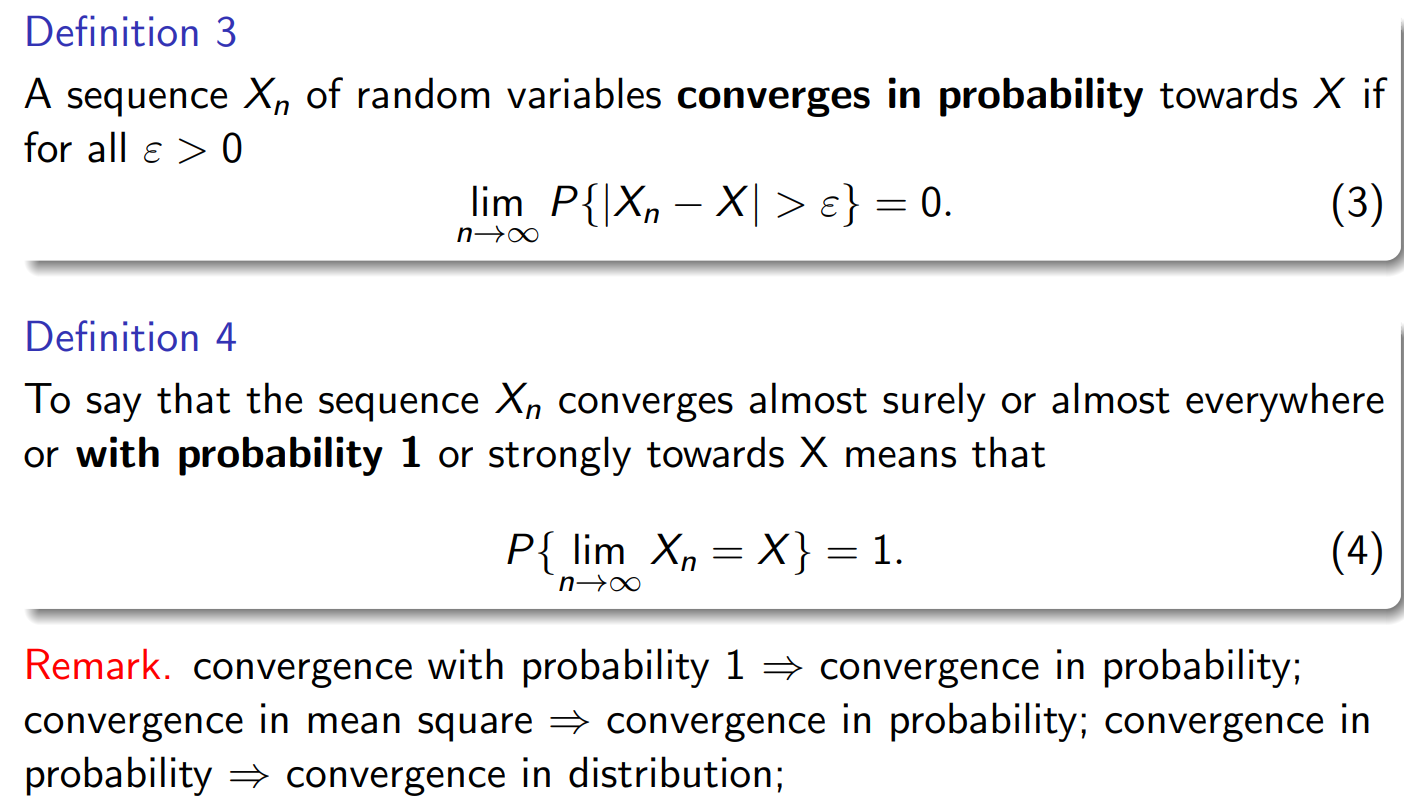
Convergence